Interactive Makers Teleop
Introduction
TurtleBot interactive markers are an alternative way to control your TurtleBot. They allow you to teleoperate the robot from rviz.
Running the Marker Server
Do these steps on the PC, not the TurtleBot laptop for best performance. First, make sure you have the package installed:
sudo apt-get install ros-hydro-turtlebot-interactive-markers
Then launch the turtlebot_marker_server, which will host an interactive_markers server.
roslaunch turtlebot_interactive_markers interactive_markers.launch
Running rviz
Next, start up a copy of rviz displaying the marker topics. On the PC, type:
roslaunch turtlebot_rviz_launchers view_robot.launch
Interact!
Check the “Interactive Makers” display component and select the “Interact” tool in the tool palette on the top of the screen (shown below) to bring up the interactive markers for the turtlebot.
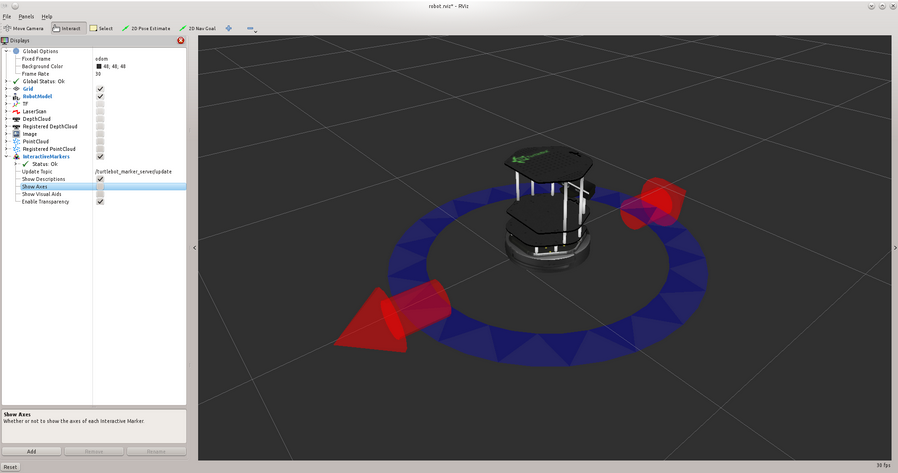
You can now drag the red arrows to drive the TurtleBot forward and backward, and the blue ring to rotate the TurtleBot. You can also drag the blue ring to both rotate and translate the TurtleBot at the same time.
Comments loading please wait.
Unfortunately if this is an https site comments will not load. Please change to use http for comments to load. in the future we plan to support https comments too.